Начни изучать подводный мир. Смотри вглубь.
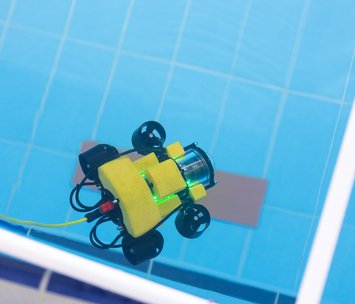
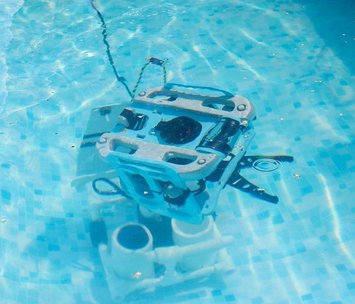
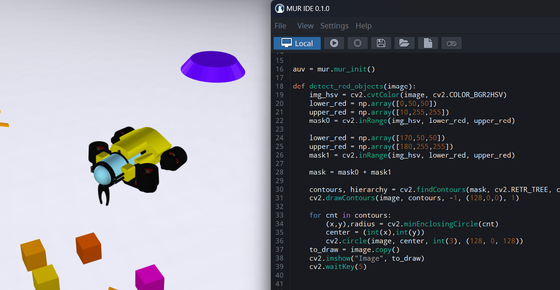
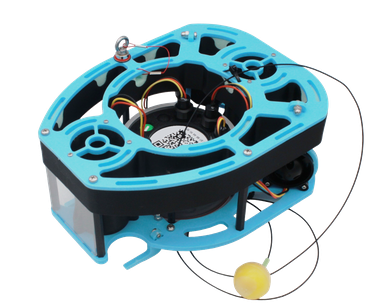
На данном сайте вы можете найти необходимое ПО для работы с подводными аппаратами, разработанными "Центром робототехники". Наборы, ПО и комплектующие MUR направлены на знакомство с морской и подводной робототехникой. Также они дают понять, какие датчики и устройства используются в подводной робототехнике, как создать подводный аппарат по своему дизайну и запрограммировать его на выполнение различных задач.
Исследования осуществлялись при грантовой поддержке Фонда «Сколково»
 г. Владивосток,
г. Владивосток,
Комсомольская, 1
 dmitry_lyakhov@mail.ru
dmitry_lyakhov@mail.ru
 +79143295525
+79143295525